
一、数据采集
1、现场规划
根据现场的情况,确定拍摄数量和具体的拍摄点位。
根据所拍摄的场景,先进行现场查看,明确场景的特点以及需要表现的方面。主要从以下几个维度进行规划。
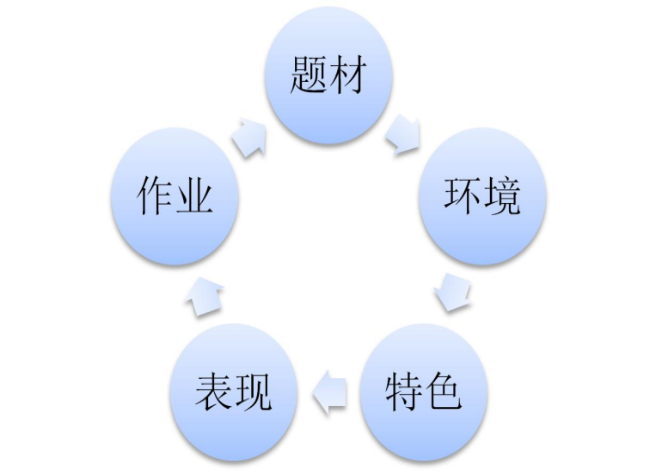
现场规划的维度
|
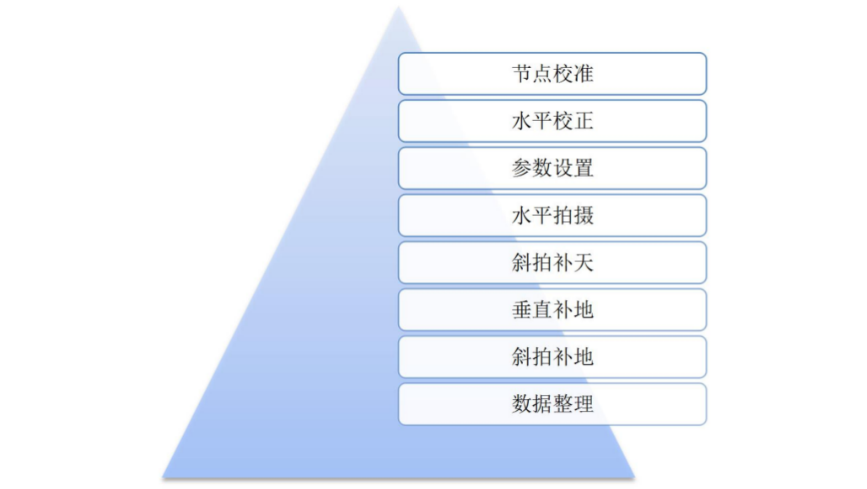
2、全景拍摄流程如下图所示:
全景拍摄流程
3、节点校准
节点是指照镜头的光学中心点,穿过此点的光线不会发生折射。在拍摄全景照片的每一次转动,都必须以镜头的节点为轴,才能保证相邻拼接的两张照片重叠部位的远近景没有位移变化,这样才能保证全景拼接的完美无痕。
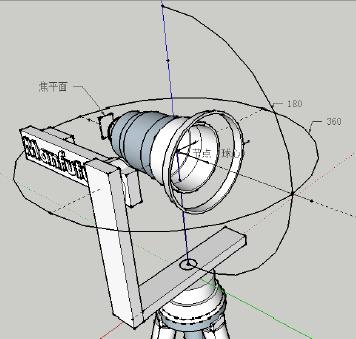
节点
通过“远近物对比法”进行节点校准工作,确定节点全完准确方可进行拍摄工作。

水平校正
4、参数设置
拍摄档位:快门、光圈、ISO 自调;
测光模式:评价测光;
图像格式:RAW+JPEG(L);
曝光模式:采用三重包围曝光;
白平衡:调节色温值“K”至正常;
色彩空间:sRGB;
照片风格:佳能机可设为“风景”或适当“加锐”;
ISO:正常情况皆为 100-200,如遇较暗场景可设定至 400-500。
光圈:全景摄影为追求大景深,可将光圈适当减小。常规光圈在 F13 上下,最大不能超过 F8;
快门:开启反光板预升。以避免反光板造成的相机抖动。
5、水平拍摄
水平拍摄 6 张照片,每间隔 60°1 张,获取水平 360°的景象。

水平拍摄
斜拍补天斜上 45°拍摄一张照片,获取天空区域的景象。

斜拍补天
垂直补地90°垂直向下拍摄 2 张照片,每张水平间隔 90°,获取地面的景象。

垂直补地
斜拍补地
挪开三脚架,斜下 45°使镜头对准刚刚三脚架放置的位置拍摄一张照片,获取地面三脚架遮挡的区域景象。

斜拍补地
完成一组数据采集后盖上镜头盖拍摄一张黑片,(用于区分组别)
6、水平拍摄
数据检查
数量统计:
一个场景点照片总数
|
基本数量 |
各角度拍摄 |
6+1+2+1 |
10 |
|
包围曝光 |
三重包围 |
3*10 |
30 |
|
存储格式 |
RAW+JPEG |
2*30 |
60 |
|
总数 |
|
|
60 |
 联系方式:18565358797
联系方式:18565358797